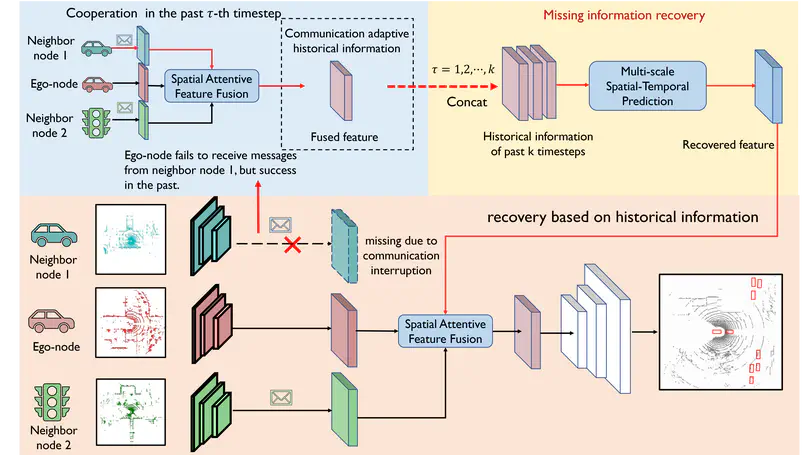
We propose a novel INterruption-aware robust COoperative Perception (V2X-INCOP) solution for V2X communication-aided autonomous driving, which leverages historical information to recover missing information due to interruption.
In the proposed interactive sketch question answering (ISQA) task, two collaborative players are interacting to answer a question about an image. This task emphasizes multi-round interaction, which is essential in daily human communication.
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Duis posuere tellus ac convallis placerat. Proin tincidunt magna sed ex sollicitudin condimentum.
We present the first latency-aware collaborative perception system, which actively adapts asynchronous perceptual features from multiple agents to the same time stamp
 publication
publication
![[ICRA 2024] Robust Collaborative Perception without External Localization and Clock Devices](/publication/conference-paper/freealign/featured_hu9e2cad90886f3ef9104988c22f7750f7_277264_808x455_fill_q75_h2_lanczos_smart1_3.webp)
![[NeurIPS2023] Emergent Communication in Interactive Sketch Question Answering](/publication/conference-paper/ecisqa/featured_hu2ef339ea6667f10a43937fefae448226_168158_808x455_fill_q75_h2_lanczos_smart1_3.webp)
![[NeurIPS2022] Where2comm: Communication-Efficient Collaborative Perception via Spatial Confidence Maps](/publication/conference-paper/where2comm/featured_hu37bc554eeab7d72d04b7620a327a2899_1535997_808x455_fill_q75_h2_lanczos_smart1_3.webp)
![[ECCV2022] Latency-Aware Collaborative Perception](/publication/conference-paper/syncnet/featured_huedc3d39f26bb99a11cdaff5fff7dd3c4_854291_808x455_fill_q75_h2_lanczos_smart1_3.webp)